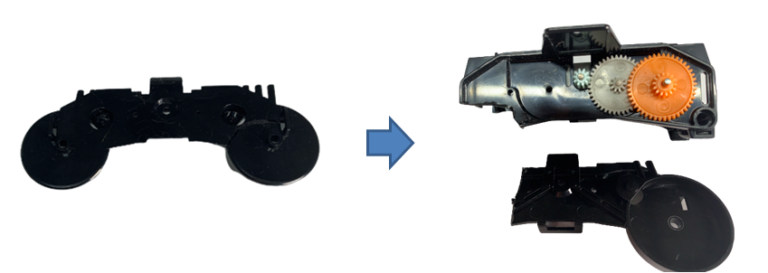
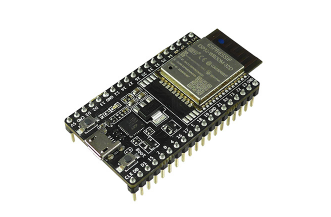
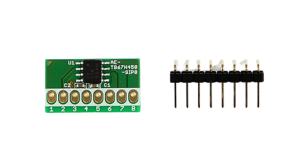
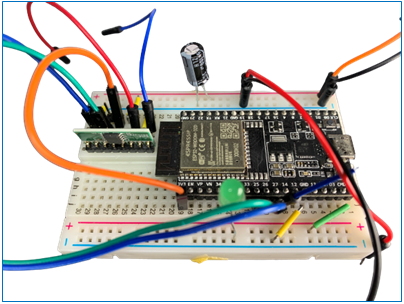
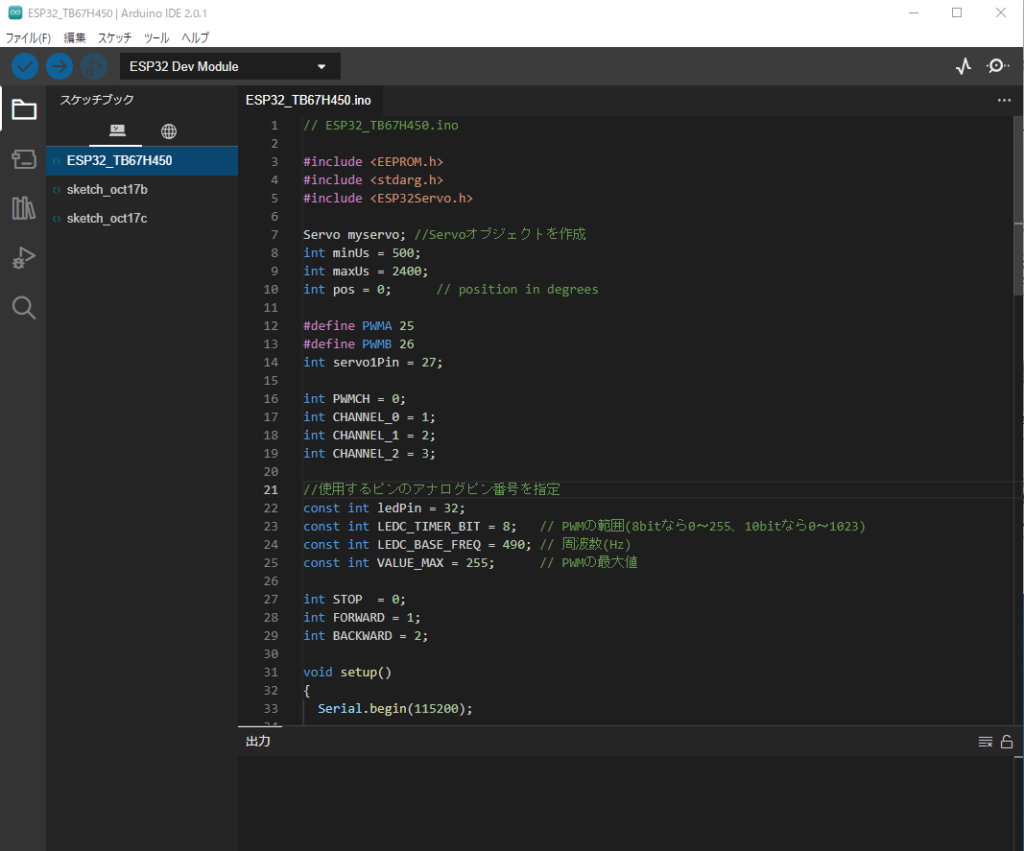
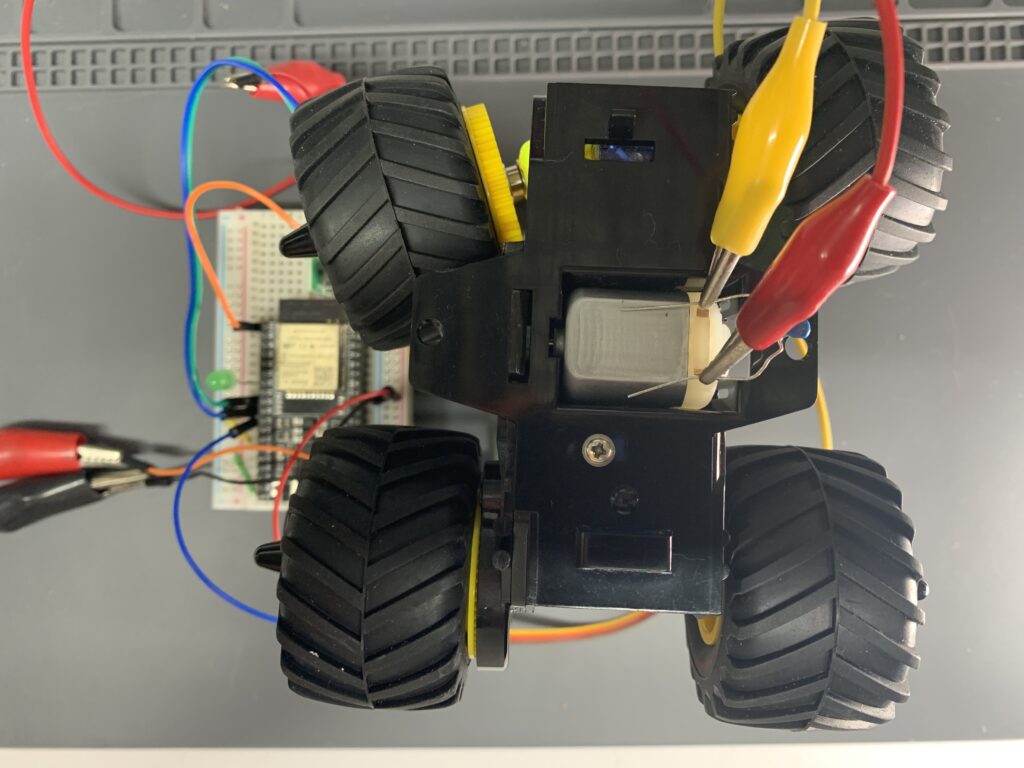
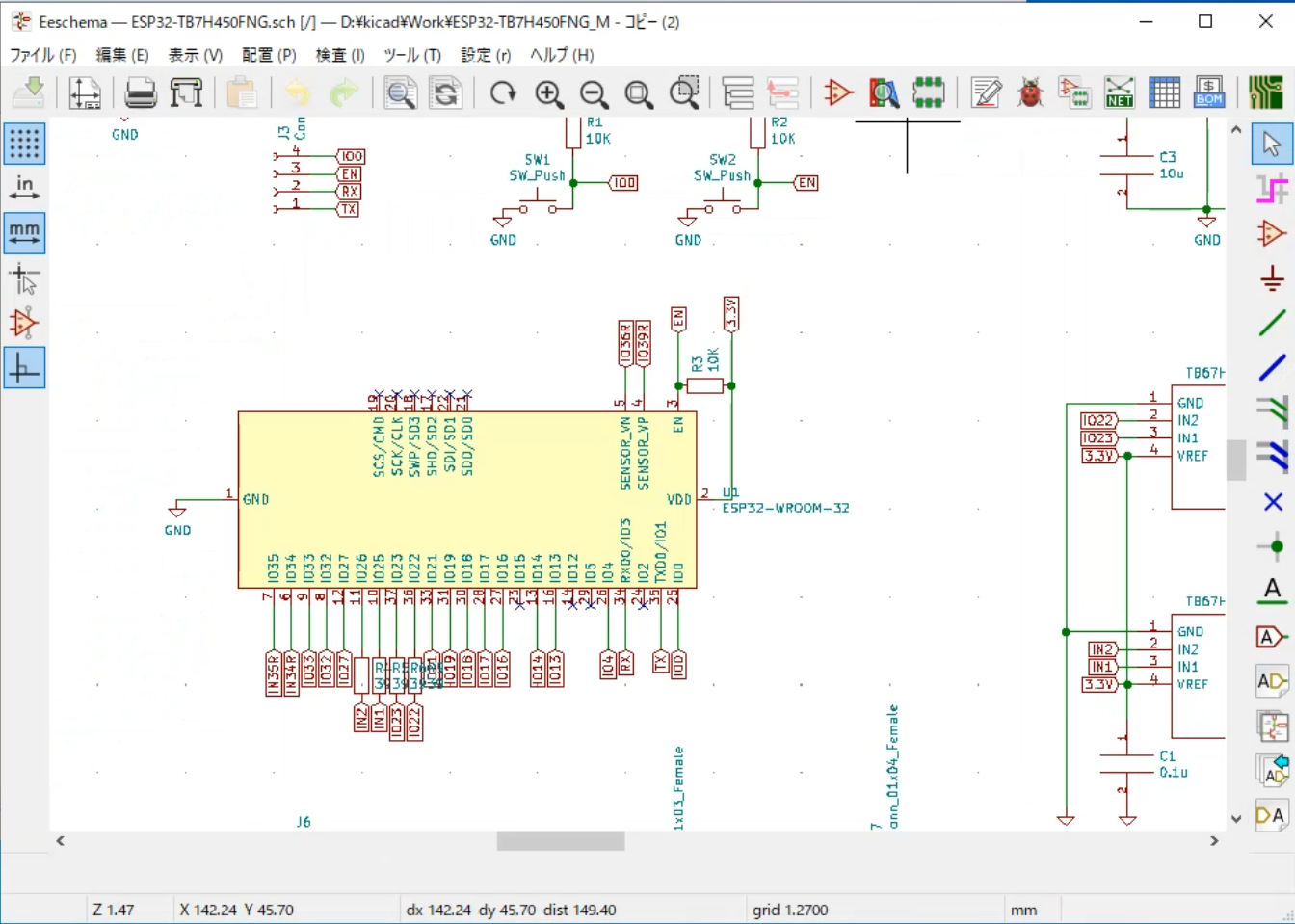
【不定期連載】【電子工作&プログラミング】タミヤ ワイルドミニ四駆 ラジコン化計画④ 2022年11月10日 タミヤ ワイルドミニ四駆 0 コメント 【ESP32でステアリングと後輪を制御&基板設計】 前回は3Dプリンターでステアリングを試作して、シャーシに取り付けました。今回は、ブレッドボードに配線して、ESP32でステアリング用のサーボモーターと、後輪用のDCモーターを制御します。うまく動作したら、基板も設計します。 まず、シャーシにギアを取り付けますが、邪魔になる部分をカットします。 試作機には、ESP32-WROOM-32D開発ボードを使います。ESP32-WROOM-32D開発ボードは、ESP-WROOM-32D が実装されている評価/開発用ボードです。シリアル⇔USB変換チップ、リセットスイッチ、ブートモードスイッチを搭載しています。ESP-WROOM-32Dは1つのモジュール内にWi-Fi通信、Bluetooth通信に必要な機能を搭載しています。秋月電子さんで購入しました。 モータドライバは、TB67H450モータドライバモジュールを選択しました。あとで基板を設計しますが、できるだけ小さな基板にしたいので、比較的小型なのと、お財布にやさしいので、このモータードライバを使ってみます。ピンヘッダーは自分ではんだ付けする必要があります。秋月電子さんで購入しました。 こんな感じでブレッドボードに配線しました。 Arduino IDE 2.0で、ステアリングとモーターの制御をテストするプログラムを作りました。テスト用なので、車輪の前進、後進、ステアリングを左右に切るだけの、簡単なプログラムです。 ランチボックスの車体のモーターに接続しました。ノイズ対策にコンデンサーを使っています。 うまく動作したので、基板を設計しました。設計には、KiCad(キキャド)という、ライセンスフリーの回路設計からアートワーク、ガーバーデータの作成まで行える統合ツールを使っています。 KiCad Eeschema(回路図エディタ) Pcbnew(レイアウトエディタ) Eeschema(回路図エディタ)で回路図を作図して、Pcbnew(レイアウトエディタ)で部品を配置して配線します。一旦、この設計で基板メーカーに発注します。 次回は、発注した基板が届いたら、基板に電子部品をはんだ付けします。 前回記事 次回記事 投稿ナビゲーション 前 前の投稿: 【Ability Electronic Work’s】お知らせ次 次の投稿: 【不定期連載】【電子工作&プログラミング】タミヤ ワイルドミニ四駆 ラジコン化計画⑤ コメントを残す コメントをキャンセルコメントを投稿するにはログインしてください。