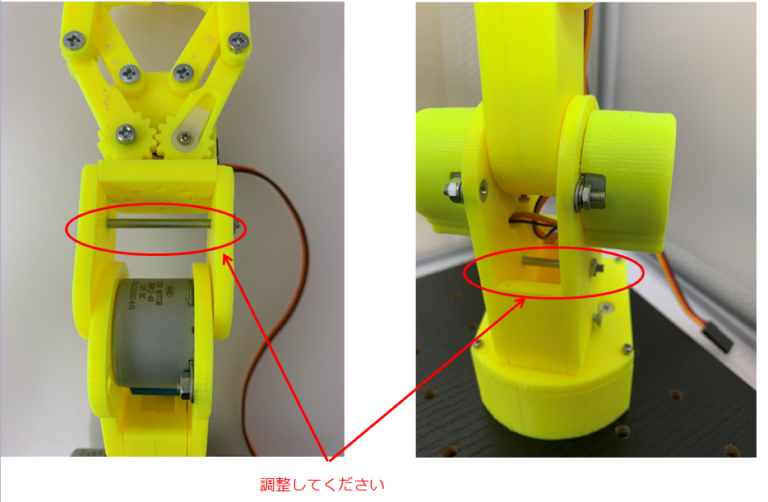
ARE-ARM1の工作手順 1.ロボットアームの組み立て ARE-ARM1工作マニュアルでは、キットの内容や組み立て方、ご注意いただく事などを詳しく解説しています。工作マニュアルの手順に従って、ロボットアームを組み立ててください。以下の組み立て動画も参考にしてください。 1.グリッパー組み立て 2.アーム台組み立て 3.アームボディ組み立て 4.アーム中を組み立て 5.各部位を結合 2.プログラミング環境の構築 ロボットアームの組み立てが完了したら、ロボットアームが動作する環境を構築します。プログラミング準備マニュアルの手順に従い、インストールや、Arm1拡張機能の設定をおこなってください。Arm1拡張機能設定動画も参考にしてください。 Arm1拡張機能の設定 3.アームの調整 ネジの締め具合を調整して、グリッパーやアームの各関節の可動域を調整します。通常のロボットアームではもっと精度の良い機構にするのですが、AREシリーズでは廉価に!がモットーですので、この辺りはざっくりです。 1.グリッパーの調整 グリッパーの調整動画を参照しながら、グリッパーの調整をおこないます。 グリッパーの調整動画では主に次の調整をおこなっています。①グリッパーがスムーズに動作するようにネジの締め具合を調整します。②サーボモーターの位置を0(開)に設定してから、グリッパーを全開にして取り付けます。③スクラッチからグリッパー開閉の指令をおこない、グリッパーの全開~全閉の値を確認します。全開値は0ですが、他のパーツとぶつかる場合がありますので、プログラムから指定する際の全開値は、10くらいがおすすめです。3Dプリンターでギアを製作しますし、ネジの締め具合にもよりますので、グリッパーごとに値が多少異なります。全閉値は70~100くらいになると思いますが、ご自身のグリッパーに合わせてプログラムから指定してください。 3.アームの調整 グリッパーの調整が終わったら、次に、アーム調整動画を参照しながら、アームの各軸の調整をおこないます。ARM1のアームの各軸モーターは安全に配慮し、発熱を抑制するために、モーター停止中は通電しない仕様にしています。このため、停止中はトルクがかかりませんので、アームの関節を手動で動かすのに、電源をOFFする必要はありません。それでも連続して動作させるとモーターの特質上、大変熱くなりますので、火傷などにはくれぐれもご注意くださいね。 アーム調整動画では主に次の調整をおこなっています。①アームの原点を設定します。電源をONした起動時の各軸のソフト原点は0度です。下図のように各軸の△マークを合わせてアームが一直線になるようにします。この形状がアームの各軸モーターの原点0度です。 アームを一直線にしたら「アーム原点を設定する」ブロックをクリックしてください。これでハードとソフトの原点位置が揃いました。 ≪注意≫原点の設定は、電源ON時にハードとソフトの原点位置のズレを補正するため、必ずおこなってください。ズレたまま動作させるとソフトリミットが正しく動作せず、ケーブルや部品が破損する場合があります。 ②各軸の移動角度を調整します。各軸に対して、調整動画に従って角度を入力したブロックをクリックして動作させます。各モーターの可動域は以下の通りです。 アーム中モーター(Motor1): 0~120度 アームボディモーター(Motor2): 0~110度 アーム台モーター(Motor3): -90~90度可動域を超えた角度を入力した場合、限界値まで移動し停止します。可動域内で入力した角度まで移動しない場合は、関節のネジ締めがきつすぎるので少し緩めて調整してください。全軸に対して指定した角度に移動するか確認してください。その時の注意点として、アームの手先は、床面以下に移動可能ですから、Motor1とMotor2の角度によっては床面にぶつかります。ぶつかると原点の設定がズレますので、原点の設定をやり直してください。 停止時にトルクをかけないことで、ネジが緩んできた場合、アームの上方向の移動が出来なくなる場合があります。締めなおして、調整してください。 完全にピッタリと指定した角度に移動できるかは微妙ですが、ほぼいい感じに調整出来ると思います。その辺は廉価な部品と機構なのでご容赦ください。(そればっかりですみません。。。)これでプログラミングの準備とアームの調整ができました。次はプログラミングマニュアルを参考にしてScratchプログラミングに挑戦しましょう。